Cameras, housings and calibration stability
Camera systems
There are some very specific design requirements for building a stereo camera system that stays ‘in calibration’. When a system goes out
of calibration, 3D measurement accuracy will be lost. The physical relationship between the camera and the camera housing port must
be stable. Typically the most stable design has the camera permanently attached to the housing port. If the camera can move around within the camera
housing (even a little bit) this will impact calibration stability. The physical relationship between the left and right camera must also be stable:
the distance between the cameras and the way the cameras point relative to each other must not change.
Every camera is different
For the purposes of stereo camera calibration, every single camera is different – even cameras that are the same model are physically different
enough to adversely affect a calibration. The same camera must always be used in the same housing (in the ideal case the camera is physically
attached to the housing port, as above). If a camera fails and is replaced with a new one, even if it is the exact same model, the stereo camera system is
no longer calibrated. If cameras are randomly fitted to different housings (compared with their calibration configuration), the systems are not calibrated.
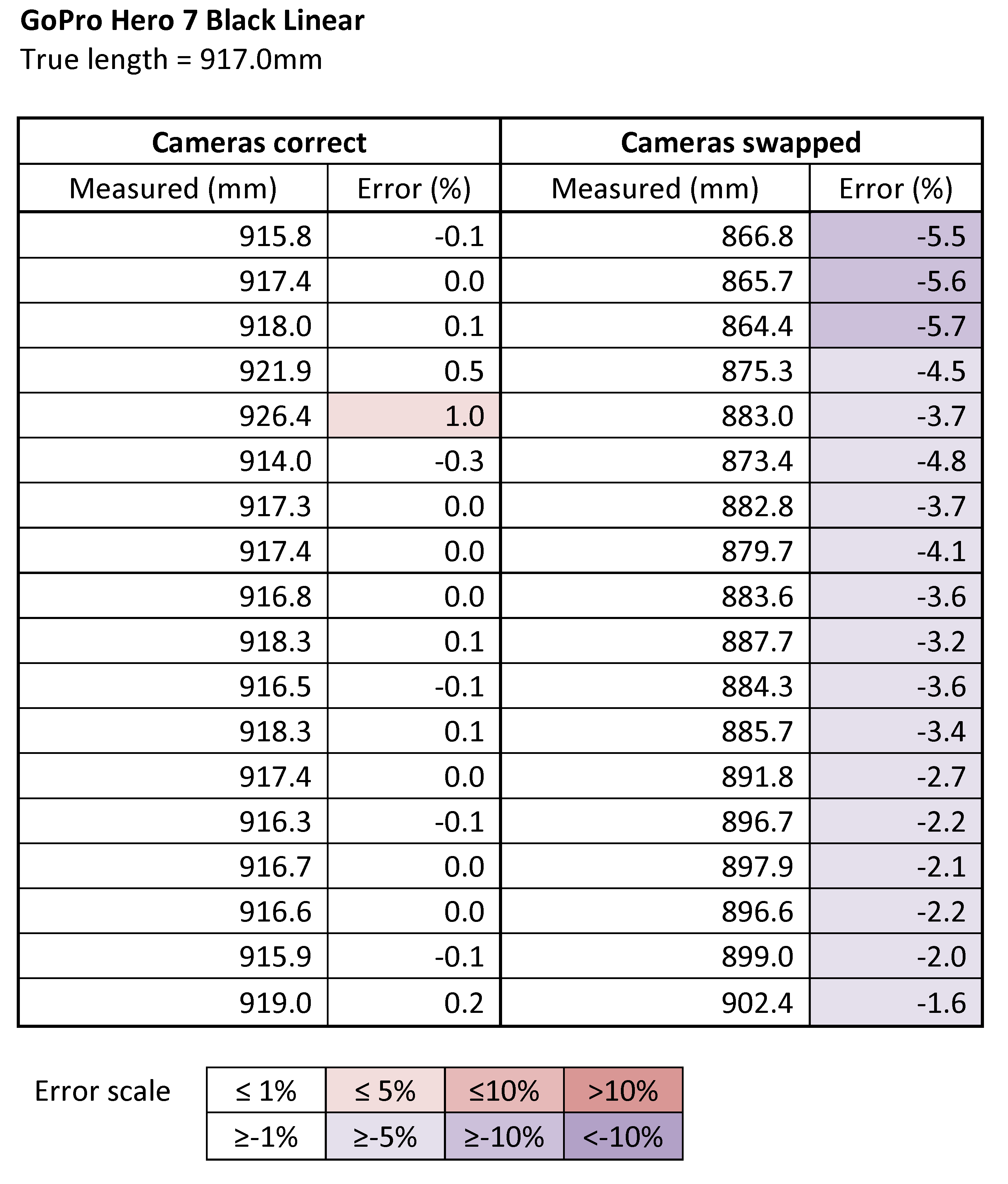
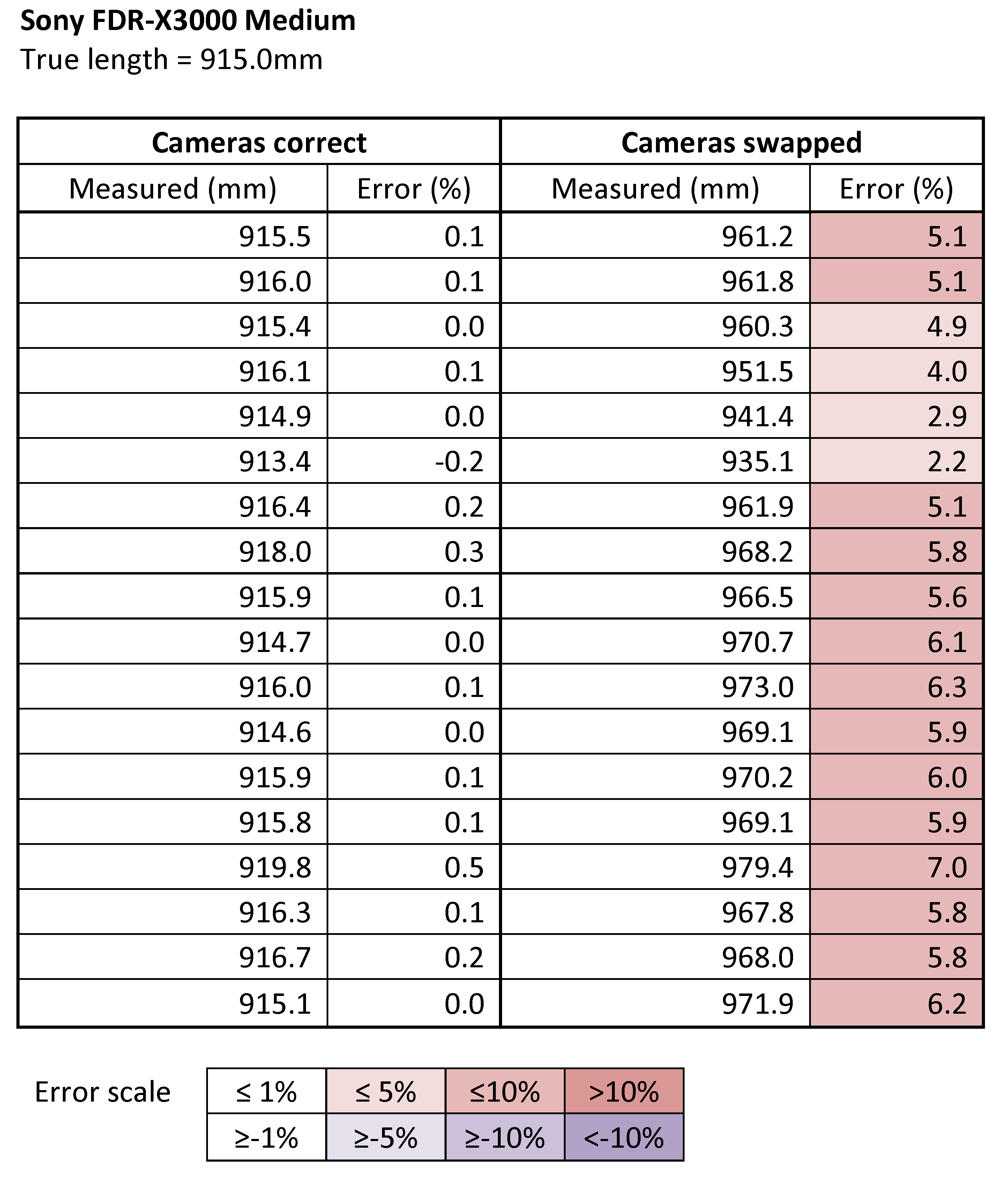
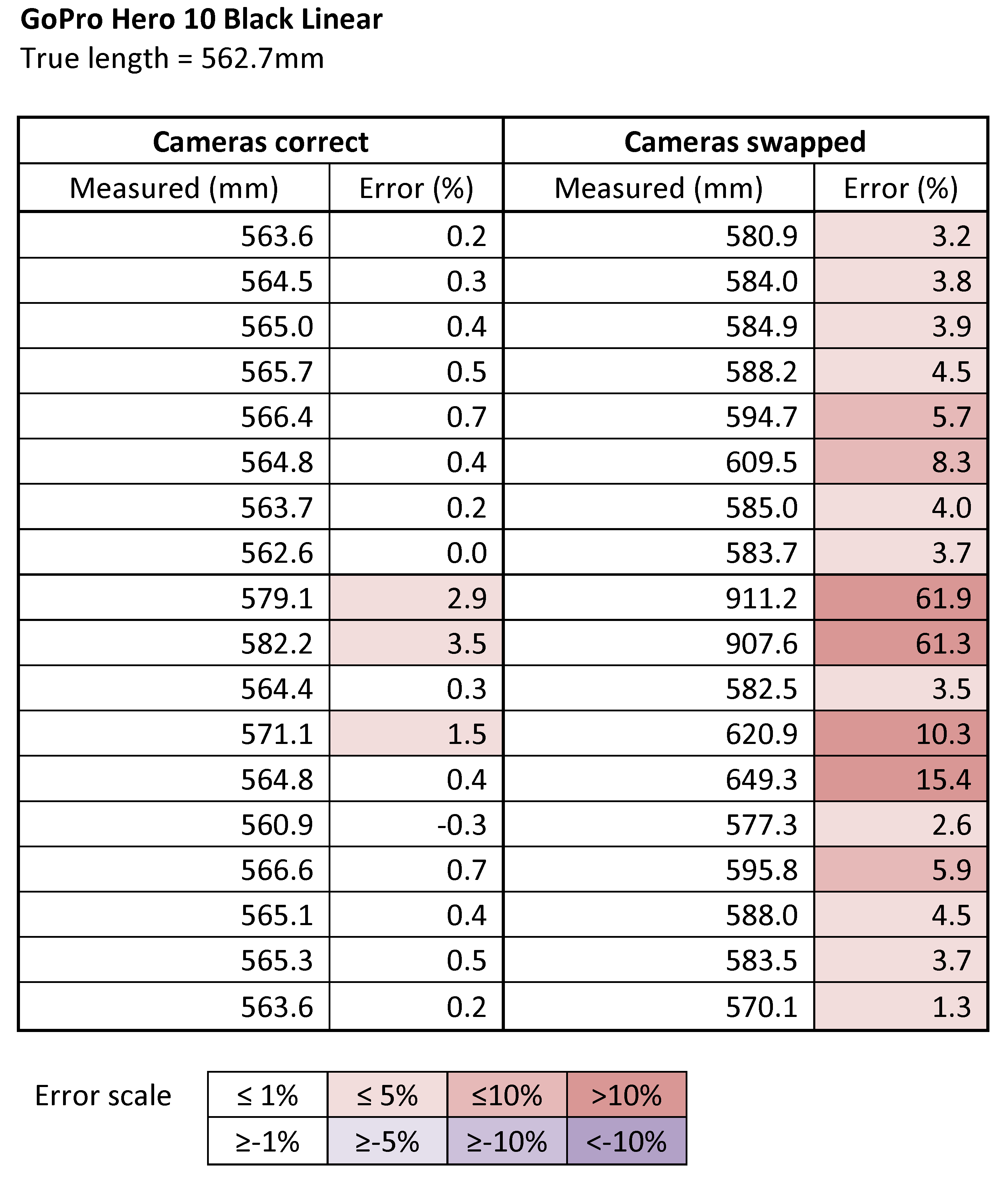
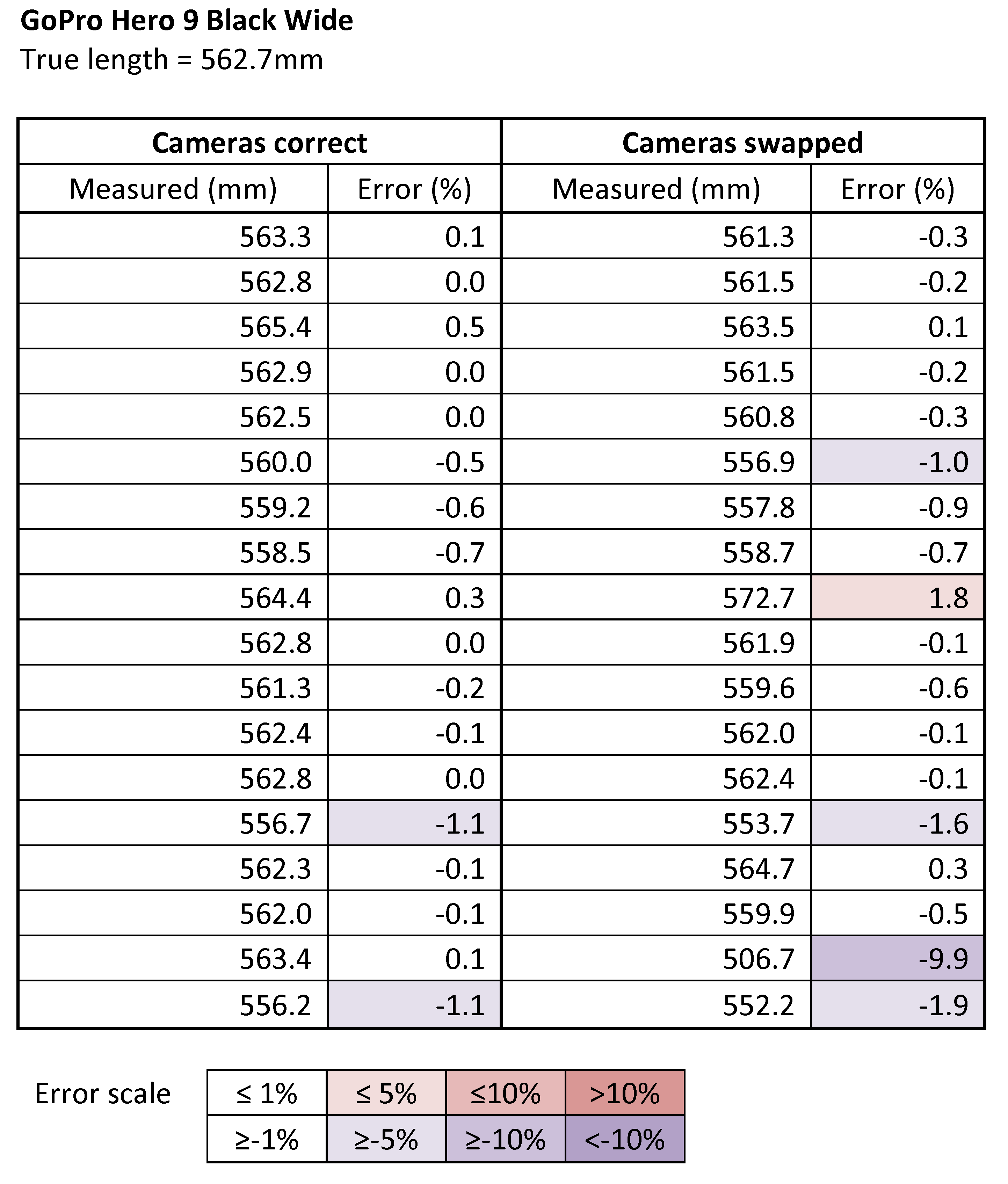
The tables below demonstrate the the effect of swapping left and right cameras in a stereo configuration. The 'Cameras correct' side of the tables shows the
results of performing a calibration, then making measurements of a scale bar (a calibrated known length). The length measurement value and percentage error are
given. The 'Cameras swapped' side of the tables shows the corresponding measurements and errors with the left and right cameras swapped. The examples are
randomly selected using a variety of commonly used cameras. In some instances the magnitude of error may not be so large, in other examples the errors tend
to always result in an under or over estimate of length. Concerningly, large errors can be expected. Do not infer from the examples that a particular model
of camera will always give a certain error trend or error magnitude – this will always be different and unpredictable.